Tú y yo. Juntos.
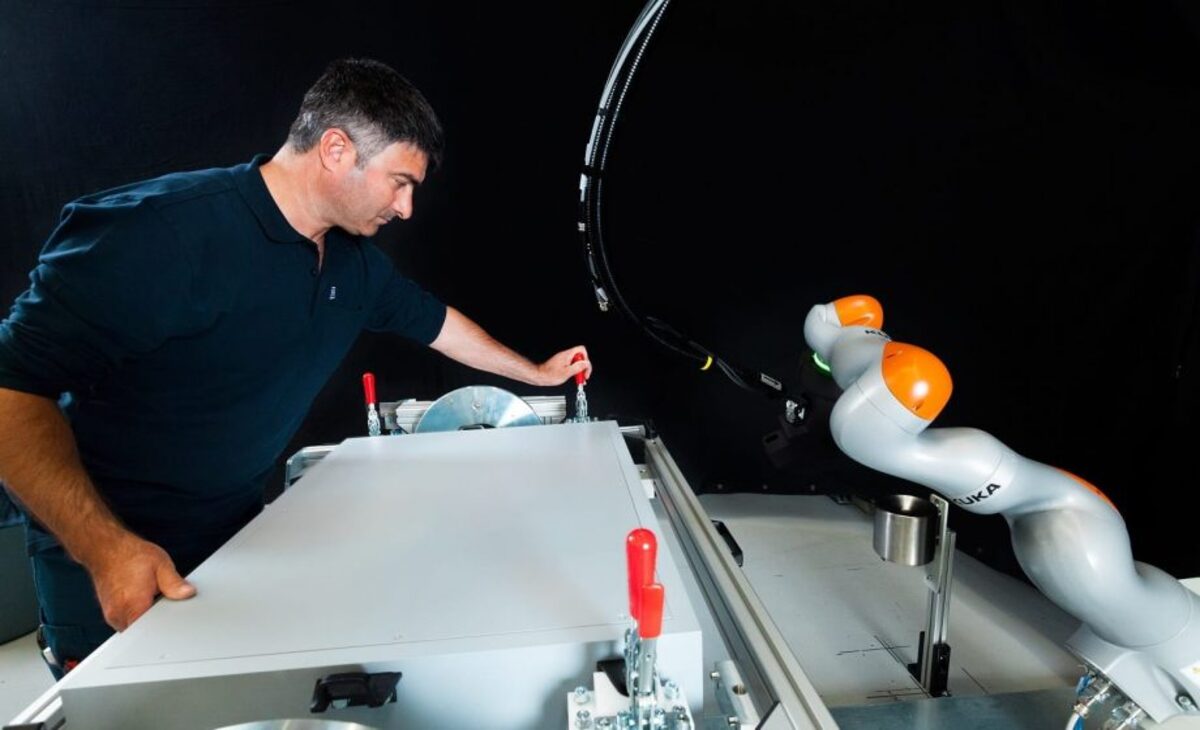
Ninguna valla de seguridad separa al hombre del robot. Ambos trabajan directamente juntos. Este tipo de automatización, conocida como colaboración hombre-robot (HRC), abre un enorme potencial. Pero, ¿Cuándo un robot es realmente “colaborativo”? ¿Y cuándo tiene sentido su uso?
En primer lugar, hay que preguntarse por el objetivo de la aplicación:
¿Qué nivel de interacción humana necesita la aplicación?
Hay “niveles” de interacción y colaboración. El objetivo de su posible robot colaborativo puede ser simplemente asistir a un trabajador humano, o puede ser que el robot trabaje en gran medida por su cuenta, con un humano que lo controle o interactúe con él en diversos intervalos.
El tipo específico de interacción que busca guiará los primeros pasos de su viaje hacia la solución de automatización adecuada.
¿Qué tipo de robot colaborativo necesita realmente?
Si se toma una decisión a favor de una solución HRC, a menudo resulta evidente que un robot industrial clásico -equipado con las capacidades de sensor adecuadas, por ejemplo- también puede trabajar en colaboración.
Si la atención se centra en los requisitos de tiempo de una aplicación HRC, debe optimizarse en términos de movimiento para que el robot no tenga que recorrer grandes distancias, si es posible, para que sea económicamente rentable. Un cobot no está diseñado para ir de A a B lo más rápido posible. Su punto fuerte es la seguridad y la sensibilidad. Esto le permite trabajar junto a los humanos en espacios muy reducidos y hace que el equipo hombre-máquina sea más productivo. Si la atención se centra en los requisitos de tiempo, la elección recae en un robot industrial adecuadamente equipado para el HRC.
Porque no todos los HRC son iguales:
Limitación de potencia y fuerza.
La primera es la limitación de potencia y fuerza, que es la que suele venir a la mente cuando se piensa en un sistema colaborativo. El robot limita su potencia y su fuerza. El control de colisiones es el objetivo.
Parada supervisada.
Las vallas de seguridad se vuelven innecesarias. El robot se detiene en cuanto el humano entra en la sala de colaboración. De este modo, se evita una colisión. La ventaja de este tipo de HRC es que aquí también se pueden utilizar robots industriales clásicos.
Control de la velocidad y la distancia.
El tercer tipo de colaboración entre humanos y robots es la monitorización de la velocidad y la distancia, lo que significa que el robot se ralentiza cuando un humano se acerca a un punto determinado y se detiene cuando esa persona está muy cerca. El objetivo: minimizar la pérdida de tiempo causada por la aproximación del humano.
Guiado manual.
El cuarto tipo se denomina enseñanza por demostración, o guiado manual. En este caso, el usuario guía al robot con la mano a una velocidad controlada y segura. La velocidad permitida se define previamente mediante una evaluación de riesgos.
En última instancia, es el nivel de interacción el que determina cuándo un robot es colaborativo. Porque, en principio, cualquier robot puede ser un robot colaborativo si se utiliza en el escenario adecuado.
El HRC contribuirá de forma significativa a la implantación de líneas de producción flexibles y rápidamente adaptables. La megatendencia de la producción en masa individualizada sólo puede seguirse con conceptos de producción flexibles.
